
越來越多新朋友加入openpilot同樂會,但是隨著時間更迭OP版本持續升級,dragonpilot也是。以前的教學已經不敷使用,所以找了點時間,為各位OP用戶們介紹一下新版本DP要如何設定。
因為最新版本還沒有到穩定狀態,目前我已去年9月左右的版本選項來介紹。各位如果使用像是0810或是0813的舊版本覺得不穩定,或是有想要比較新的介面。儘管OP已經不維護C2/O2,DP一樣有新介面可以使用。
簡單介紹一下這個版本的差異,DP0810駕駛監控有時候會有誤判,DP0813的行駛黑屏在VAG會不成功。所以DP這個版本解決了上面兩個問題,同時也用了Bigmodel與選單式的全時車維可以使用,所以推薦給車友升級安裝。接下來就介紹設定過程吧!
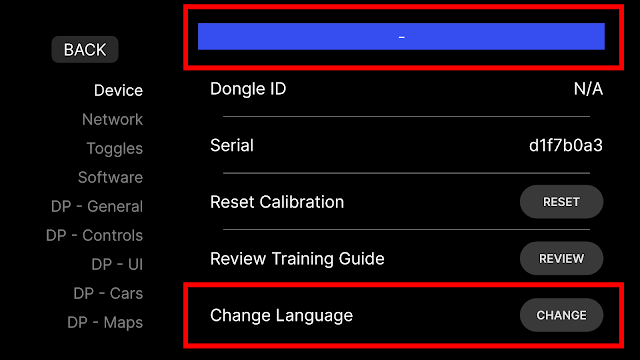
安裝好全新DP後,第一個是先選定車型押上面藍色Bar條,就會跳出車型列表。第二是下面Change Language更改語系
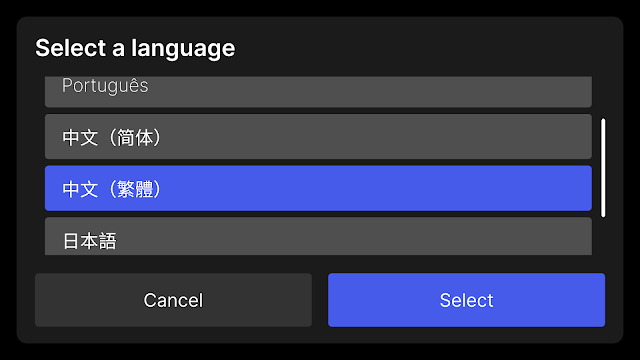
改成中文以後選單會更直觀

接著到設定選項,把[使用公制單位]打開,然後把[油門取消空車]關閉。

然後我們到了DP-一般,如果你想要讓DP行車紀錄鏡頭錄影,就可以把這個選單打開。C2/O2就會在/data/media/0/fakedata/資料夾下保留錄影資料。

由於新版DP使用了Bigmodel會增加功耗,DP預設關閉相機可以降低散熱。不過我們C2跟O2可以使用駕駛監控,強烈推薦各位把它打開。(點選後會要求重新開機,如果你還要設定其他功能,那就先取消,駕駛監控下次開機就會生效。)

順便提一個功能,如果你有保留行駛紀錄,有時候會遇到資料存滿了不能自動刪除循環錄影,就押最底下這個功能,就可以清空行車紀錄檔案。

橫向控制預設是最新0.8.16,如果要採用舊模型0.8.13,就把設定改成1,就可以換成C2最後一版ai模型

VAG全時置中設定為1,VAG如果開啟實驗模式那就要設定為2,Toyota因為本身有OP long所以選擇2

如果要使用O2或C2的實驗模式,一律建議打開DE2E,然後VAG一定要開DE2E用於VOACC之下。(配合加速模式就看你有沒有打開手動加速模式)
最後是DP-畫面,顯示模式改成1,連接車子後行駛狀態就會黑屏,因為開機後就會自已黑屏,如果要恢復,只要沒接type-c沒跟車子連線,只接電源的狀態開機,就可以進入設定頁面,恢復成零。
Toyota指定好車型以後可以改控制器為3,尤其是TSS1車款控制角度會比較好。

Toyota我通常都建議預設開這兩項,視覺模型控制跟手動控制車距
Toyota前面的設定之後,車型內如果是TSS1油電的車需要開SNG修正,然後開啟跟車距離關聯這樣就可以用方控修改跟車距離。以上就是Toyota車型的基本設定。
另外如果覺得Laneless不夠置中,可以把使用車道線打開,然後相機偏移改成-6。以-6為中心,押-車子會往右,押+車子會往左。建議在高速公路直線下調整,數字調整之後1秒內會生效。
beta2開啟實驗模式之後
如果要使用O2或C2的實驗模式,一律建議打開DE2E,然後VAG一定要開DE2E用於VOACC之下。(配合加速模式就看你有沒有打開手動加速模式)
最後是DP-畫面,顯示模式改成1,連接車子後行駛狀態就會黑屏,因為開機後就會自已黑屏,如果要恢復,只要沒接type-c沒跟車子連線,只接電源的狀態開機,就可以進入設定頁面,恢復成零。
再來就是有人覺得音浪太強,車上有小孩睡覺,那就可以開靜音模式,一般提示會靜音,但仍保留危險警告音效。或是你可以把提示音量降低,通常設定到30%以下,音量就開始小於胎躁聲。
這些設定完成後,就可以重新開機,然後上路校正你的openpilot囉。祝各位使用openpilot駕駛輕鬆,安全往返。
Toyota常用設定
Toyota指定好車型以後可以改控制器為3,尤其是TSS1車款控制角度會比較好。
Toyta全時置中要選擇2,Torque自動調教建議打開(但他要上路開15分鐘校正以後才會生效)
Toyota我通常都建議預設開這兩項,視覺模型控制跟手動控制車距
Toyota前面的設定之後,車型內如果是TSS1油電的車需要開SNG修正,然後開啟跟車距離關聯這樣就可以用方控修改跟車距離。以上就是Toyota車型的基本設定。
----------------------------------------------------------------------------------------------------------------
如果你是第一次來到這邊,歡迎加入下方社群,我都會在第一時間報導與解析Comma ai與openpilot的最新動態,快來一起follow吧!



